Postdoctoral Fellow, Vanderbilt University
Joshua B. Gafford


Kalman Filtering for Real-Time Biological Tissue Identification
Soft tissue parameter estimation embodies a wide area of active research in academia with the goal of creating accurate finite element models for haptic simulations and needle insertion modeling. The rise of robotics in surgery has also opened up the possibility of robotically palpating tissue and using local mechanical properties of the tissue as biomarkers to localize metastases in vivo.
In this work, we explore the possibility of using Kalman filter-based parameter estimation techniques to quantify viscoelastic tissue properties online in real time. In doing so, we develop a discretized model of the nonlinear tool/tissue dynamics and analyze the model for observability using the determinant of the Lie derivative matrix. The model is then linearized and three different Kalman filter methodologies (Extended, Unscented, and Adaptive Fading) are implemented to estimate inherent tissue properties based on a popular model of tissue dynamics (Kelvin-Voigt). Functionality is demonstrated in simulation, and an experimental platform is fabricated to test the filter properties in hardware. We use this platform to assess the efficacy of the three filters in a variety of different scenarios. Convergence is assessed by analyzing the trace of the error covariance. Ultimately, we have demonstrated that it is possible to repeatably estimate the viscoelastic properties of biological tissue with sufficiently fast (<200 ms) convergence. This work could be a preliminary step in creating robust estimation algorithms that could potentially enable low-level robotic control decisions to be made based on the local mechanical footprint of the biological tissue.
Course: 2.160: System Identification, Estimation and Control (MIT)

Schematic of Kelvin-Voigt tissue model interacting with dynamic analyzer

Experimental Setup consisting of a voice coil and suction interface to provide dynamic impulse, a load cell to measure the reaction force, and a linear encoder to measure position

Discretized form of the coupled analyzer/Kelvin-Voigt dynamics


Simulink model with three different filters implemented simultaneously
Reconstructed Stiffness Profile of a tissue analog with unknown high-stiffness intrusions
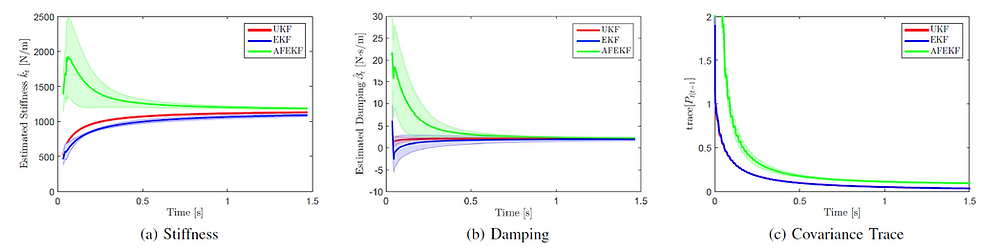
Results of three different filter performances on an actual biological sample (porcine liver), where samples were taken at 10 different locations (shaded area represents standard deviation): (a) stiffness, (b) damping, (c) covariance trace
This paper details the design, analysis, fabrication and validation of a deployable, atraumatic grasper intended for retraction and manipulation tasks in manual and robotic minimally-invasive surgical procedures. Fabricated using a combination of shape deposition manufacturing (SDM) and 3D printing, the device (which acts as a deployable endeffector for robotic platforms) has the potential to reduce the risk of intraoperative hemorrhage by providing a soft, compliant interface between delicate tissue structures and the metal laparoscopic forceps and graspers that are currently used to manipulate and retract these structures on an ad-hoc basis. This paper introduces a general analytical framework for designing SDM fingers where the desire is to predict the shape and the transmission ratio, and this framework was used to design a multi-jointed grasper that relies on geometric trapping to manipulate tissue, rather than friction or pinching, to provide a safe, stable, adaptive and conformable means for manipulation. Passive structural compliance, coupled with active grip force monitoring enabled by embedded pressure sensors, helps to reduce the cognitive load on the surgeon. Initial manipulation tasks in a simulated environment have demonstrated that the device can be deployed though a 15mm trocar and develop a stable grasp using Intuitive Surgical’s daVinci robotic platform to deftly manipulate a tissue analog.
Course: ES227: Medical Device Design (Harvard)
Shape Deposition Manufacturing of a Surgical Grasper

Overview Video
Sectional View of Subassemblies
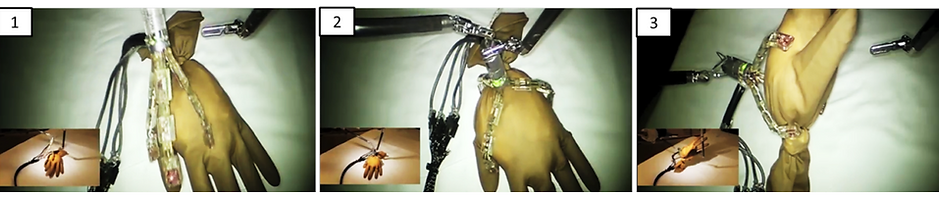
Roboloaparoscopic Retraction simulation with grasper prototype
Relevant Publications:
Shape Deposition Manufacturing of a Soft, Atraumatic, and Deployable Surgical Grasper
Gafford, J.B., Ding, Y., Harris, A., McKenna, T., Polygerinos, P., Holland, D., Moser, A.
Journal of Mechanisms and Robotics (2015), 7(2), 021006.
Mechanical Design and Fabrication of a Low-Cost, Modular, Mobile Gantry for Non-Invasive Medical Applications
This paper details the design and development of a low-cost, human-sized, mobile, mechanical gantry for potential use in non-invasive medical imaging procedures. The gantry features two independently-actuated aluminum rings, each capable of supporting a variety of different medical instruments. The gantry described herein was designed to integrate with an existing flat-panel Volume Computed Tomography (CT) scanner to create a hybrid Optical Tomography/Computed Tomography setup to facilitate image co-registration. However, the gantry also has potential utility in MRI co-registration, low-cost CT, laser therapy, and any other applications that necessitate precise, stepwise 360-degree rotary motion around a patient. The total production cost for the gantry, including stock, labor, and assembly, was ~$15,000. Preliminary tests show that the gantry in open-loop has a positional repeatability to within 70 μm.
Course: 2.750/2.753: Medical Device Design (MIT)

Rendering of tomographic gantry integrated with Siemens fpVCT scanner

Image of gantry prototype
Relevant Publications:
Mechanical Design and Fabrication of a Low-Cost, Modular, Mobile Gantry for Non-Invasive Medical Applications.
Gafford, J. B., & Schneider, J.
ASME 2011 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, (Vol. 6). Washington DC.